Peter D Peng, MD, Caitlin M Schneider, BS, Russell H Taylor, PhD, Christopher J Hasser, PhD, Simon P DiMaio, PhD, Michael R Marohn, MD, Michael A Choti, MD. Department of Surgery, Johns Hopkins Hospital; Department of Computer Science, Johns Hopkins University; Intuitive Surgical Inc
Objectives:
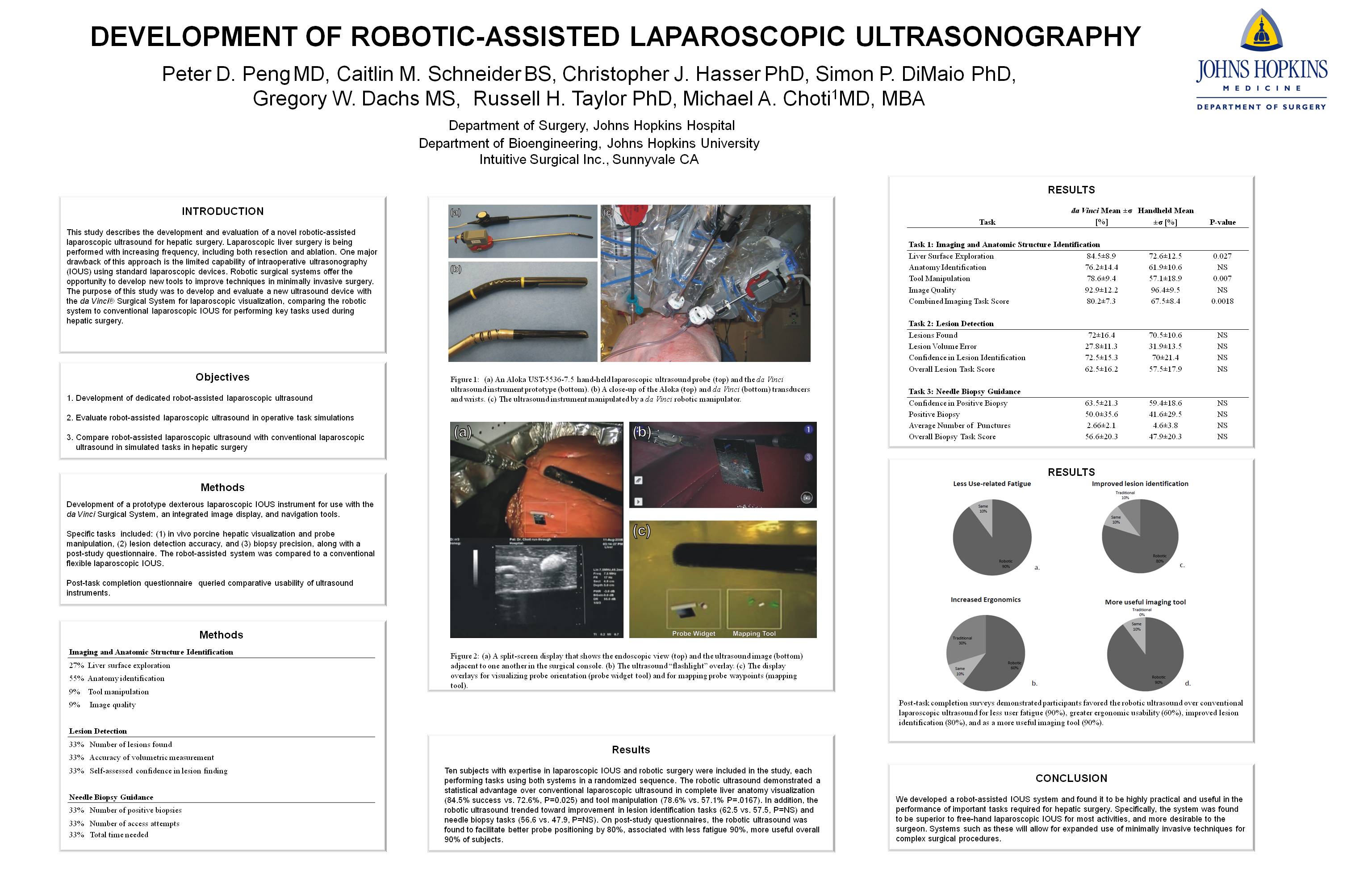
This study describes the development of a novel robotic-assisted laparoscopic ultrasound for hepatic surgery. Minimally invasive surgery is being performed with increased frequency, with clear advantages. Robotic-assisted minimally invasive surgery leverages the benefits of computer-assisted increased dexterity, 3-dimensional visualization, and improved ergonomics. Intraoperative ultrasound is important in hepatic surgery, and a current restriction of the robotic approach is the limited capability of IOUS by using standard laparoscopic devices revealing the need for a dedicated robotic ultrasound. We describe the development of a novel ultrasound device coupled to the da Vinci® Robotic Surgical System for use in robotic liver surgery.
Description of Technology and Method of Use:
The system consists of a prototype dexterous laparoscopic ultrasound instrument for use with the da Vinci surgical system, an integrated image display, and navigation tools. A prototype da Vinci robotic ultrasound instrument was developed based on the 5mm EndoWrist instrument architecture, but scaled to a diameter of 10mm in order to accommodate an off-the-shelf linear laparoscopic transducer (Gore Tetrad, Colorado, U.S.A.). The 5mm wrist is based on a cable-driven multi-link snake architecture that—when scaled to 10mm—is able to accommodate the coaxial cable bundle that is routed through the center of the instrument shaft from the transducer to the system cable interface at the rear of the instrument. The linear transducer contains 128 elements, has a total array length of 46mm, and operates at a center frequency of 7.5MHz. In terms of geometry and imaging performance, the RLUS instrument is similar to standard hand-held laparoscopic probes that are in use today, such as the Aloka UST-5536-7.5 (Aloka America, Connecticut, U.S.A.). The articulated wrist allows for a range of motion of ±80º in both pitch and yaw angles, thus giving the surgeon six-degree-of-freedom control of the probe, from the master tool manipulators of the surgical console. An integrated open-source software framework developed by our lab displays ultrasound images, probe status, and guidance information on the da Vinci console, with both picture-in-picture, split-screen, and probe-flag extension viewing options.
Preliminary Results:
A preliminary user study by surgeons in tasks simulating liver surgery: phantom lesion detection, needle biopsy, in vivo porcine hepatic visualization, and device manipulation tasks found the system to be highly dexterous and facilitate accurate task completion in these simulations.
Conclusions:
This study describes the development of a robotic laparoscopic ultrasound for intraoperative use, which proved to be highly dexterous and effective in simulation studies. Our future goals include the transition of this device to preclinical and clinical studies in hepatobiliary surgery.
Session: Emerging Technology Poster
Program Number: ETP008
View Poster
{kind=link}