Peter D Peng, MD, Caitlin M Schneider, BS, Russel H Taylor, PhD, Christopher J Hasser, PhD, Gregory W Dachs, PhD, Simon P DiMaio, PhD, Michael R Marohn, DO, Michael A Choti, MD. Johns Hopkins University, Intuitive Surgical Inc.
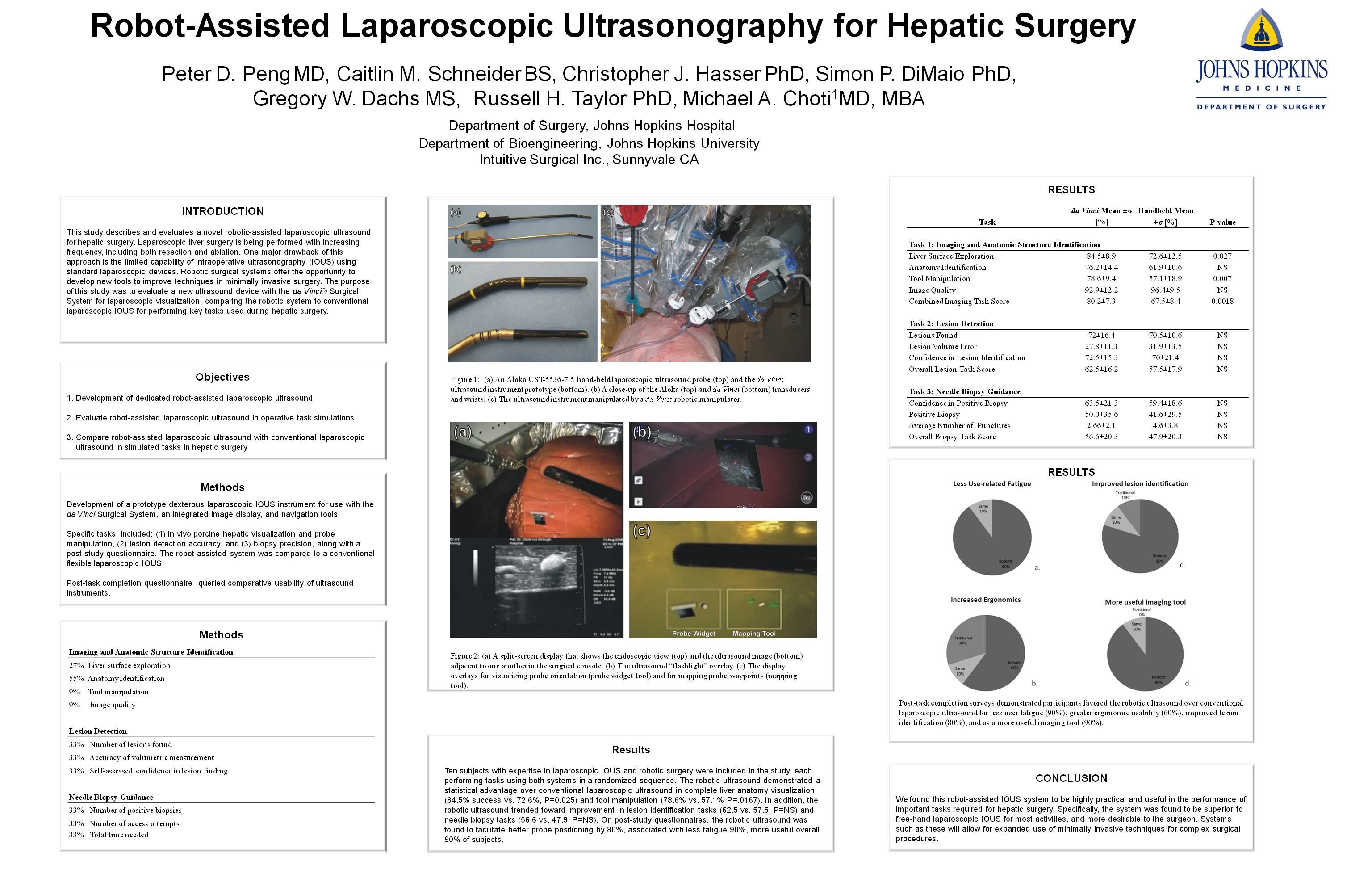
BACKGROUND: Laparoscopic liver surgery is being performed with increasing frequency, including both resection and ablation. One major drawback of this approach is the limited capability of intraoperative ultrasonography (IOUS) using standard laparoscopic IOUS devices. Robotic surgical systems offer the opportunity to develop new tools to improve techniques in minimally invasive surgery. The purpose of this study was to evaluate a new ultrasound device with the da Vinci® Surgical System for laparoscopic visualization, comparing the robotic system to conventional laparoscopic IOUS for performing key tasks used during hepatic surgery.
METHODS: The system consists of a prototype dexterous laparoscopic IOUS instrument for use with the da Vinci surgical system, an integrated image display, and navigation tools. Specific tasks were developed, including (1) in vivo porcine hepatic visualization and probe manipulation, (2) lesion detection accuracy, and (3) biopsy precision, along with a post-study questionnaire. The robot-assisted system was compared to a conventional flexible laparoscopic IOUS.
RESULTS: Ten subjects with expertise in laparoscopic IOUS and robotic surgery were included in the study, each performing tasks using both systems in a randomized sequence. The robotic ultrasound demonstrated a statistical advantage over conventional laparoscopic ultrasound in complete liver anatomy visualization (84.5% success vs. 72.6%, P=0.025) and tool manipulation (78.6% vs. 57.1% P=.0167). In addition, the robotic ultrasound trended toward improvement in lesion identification tasks (62.5 vs. 57.5, P=NS) and needle biopsy tasks (56.6 vs. 47.9, P=NS). On post-study questionnaires, the robotic ultrasound was found to facilitate better probe positioning by 80%, associated with less fatigue 90%, more useful overall 90% of subjects.
CONCLUSION: We found this robot-assisted IOUS system to be highly practical and useful in the performance of important tasks required for hepatic surgery. Specifically, the system was found to be superior to free-hand laparoscopic IOUS for most activities, and more desirable to the surgeon. Systems such as these will allow for expanded use of minimally invasive techniques for complex surgical procedures.
Session: Poster
Program Number: P496
View Poster
{kind=link}