Lee W White, BSE, Timothy Kowalewski, PhC, Blake Hannaford, PhD, Thomas S Lendvay, MD FACS. University of Washington, Seattle Childrens Hospital
OBJECTIVE Robotic surgery offers the potential to provide high resolution video and instrument movement data which capture the (technical) non-cognitive aspects of surgery. These data are critical in objectively assessing surgical skill performance and could enable the development of training algorithms to accelerate learning curves. While video information can readily be captured, only a few research centers have access to the instrument data housed within the da Vinci robot’s Application Programming Interface (API). Here we present a hardware and software solution that obviates the need for da Vinci API access during dry, cadaver, and animal lab training: SurgTrak. Our method achieves comparable data (all degrees of freedom of the tool and wrist and camera) to the da Vinci API at a far lower cost and without the intellectual property agreements needed to license API access from Intuitive Surgical. Our hardware and software is highly configurable and because of its design, system modification will not put the robot at risk of damage or cause malfunction.
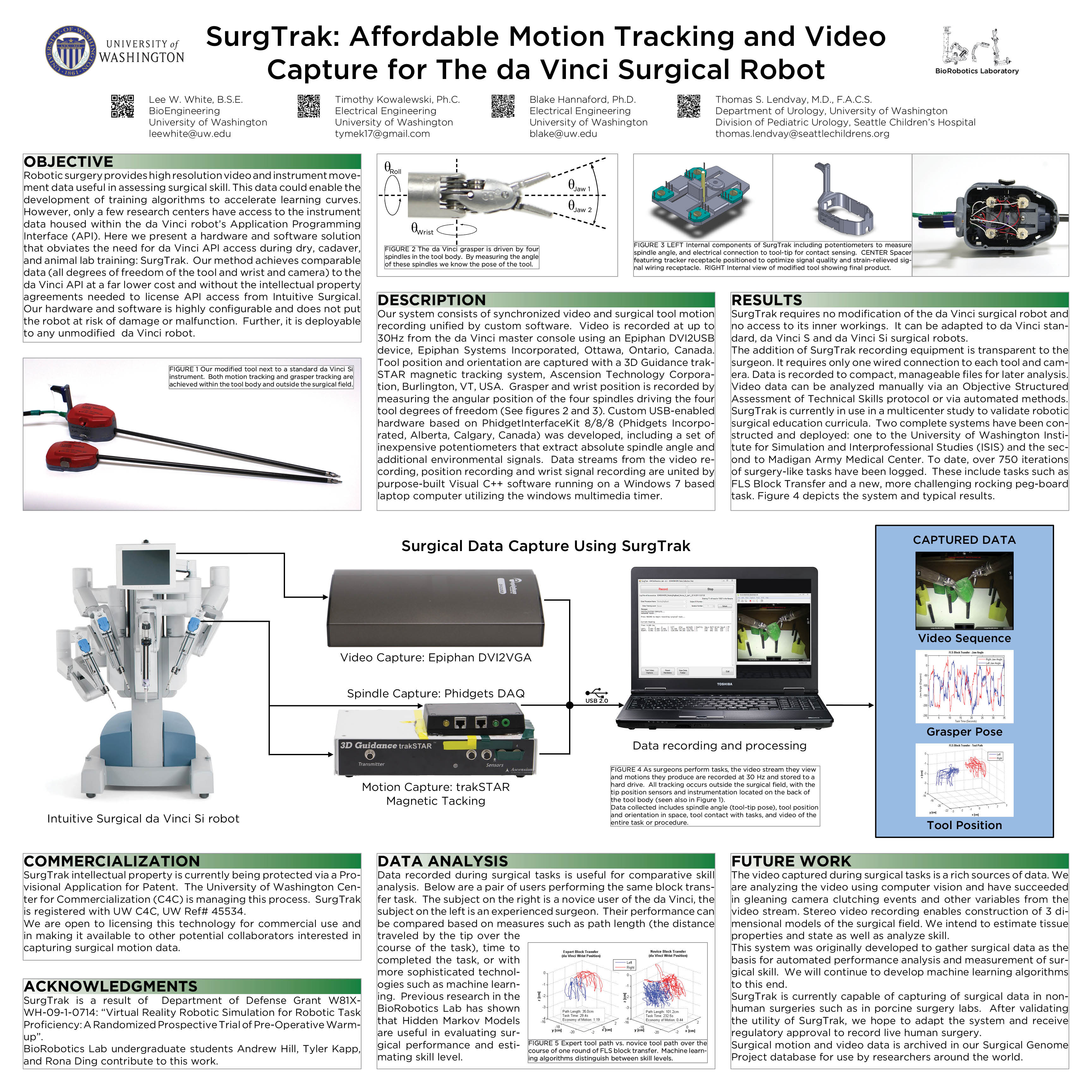
DESCRIPTION Our system consists of synchronized video and surgical tool motion recording unified by custom software. Video is recorded at up to 30 frames per second from the DVI output of the da Vinci master console using an Epiphan DVI2USB device. Video is encoded using mpeg-4 compression to produce compact, manageable files. Tool motion data is recorded at 30 Hz. Tool position and orientation are captured with a 3D Guidance trakSTAR magnetic tracking system. Grasper and wrist position is recorded by measuring the angular position of the four spindles driving the four tool degrees of freedom. Custom USB-enabled hardware was developed for this task including a set of inexpensive potentiometers that extract absolute spindle angle as well as additional environmental signals such as tool contact. Data streams from the video recording, position recording and wrist signal recording are united using Visual C++ software running on a Windows 7 based laptop computer utilizing the windows multimedia timer to enforce a consistent sampling rate.The addition of the recording equipment is transparent to the surgeon. It requires only one wired connection to each tool and camera. The platform also includes a set of customized plastic fixtures which register tasks to a consistent coordinate system, eliminate potential collisions, and minimize interference artifacts.
PRELIMINARY RESULTS SurgTrak is currently employed to validate robotic surgical education curricula. Over 750 iterations of surgery-like tasks have been logged. Figure 1 demonstrates typical results.
CONCLUSIONS AND FUTURE DIRECTIONS SurgTrak is a novel surgical performance tracking device that promises to expand the ability of clinicians, educators, and researchers to obtain valuable instrument position/angle data linked to real-time video streams from the da Vinci robot without API access. This system addresses the limitations of current subjective video analysis for surgical performance assessment by offering a low cost means of quantifying objective performance metrics used for technical skills training. Moreover, it provides quantitative sciences a means for developing novel, objective skill metrics.
ACKNOWLEDGEMENTS SurgTrak is a result of DoD grant W81XWH-09-1-0714.
Session: Emerging Technology Poster
Program Number: ETP026
View Poster
{kind=link}