Xu Xiao, Mr, Mengnan Li, Mr, Andreas Melzer, Prof. Institute for Medical Science and Technology, University of Dundee, UK
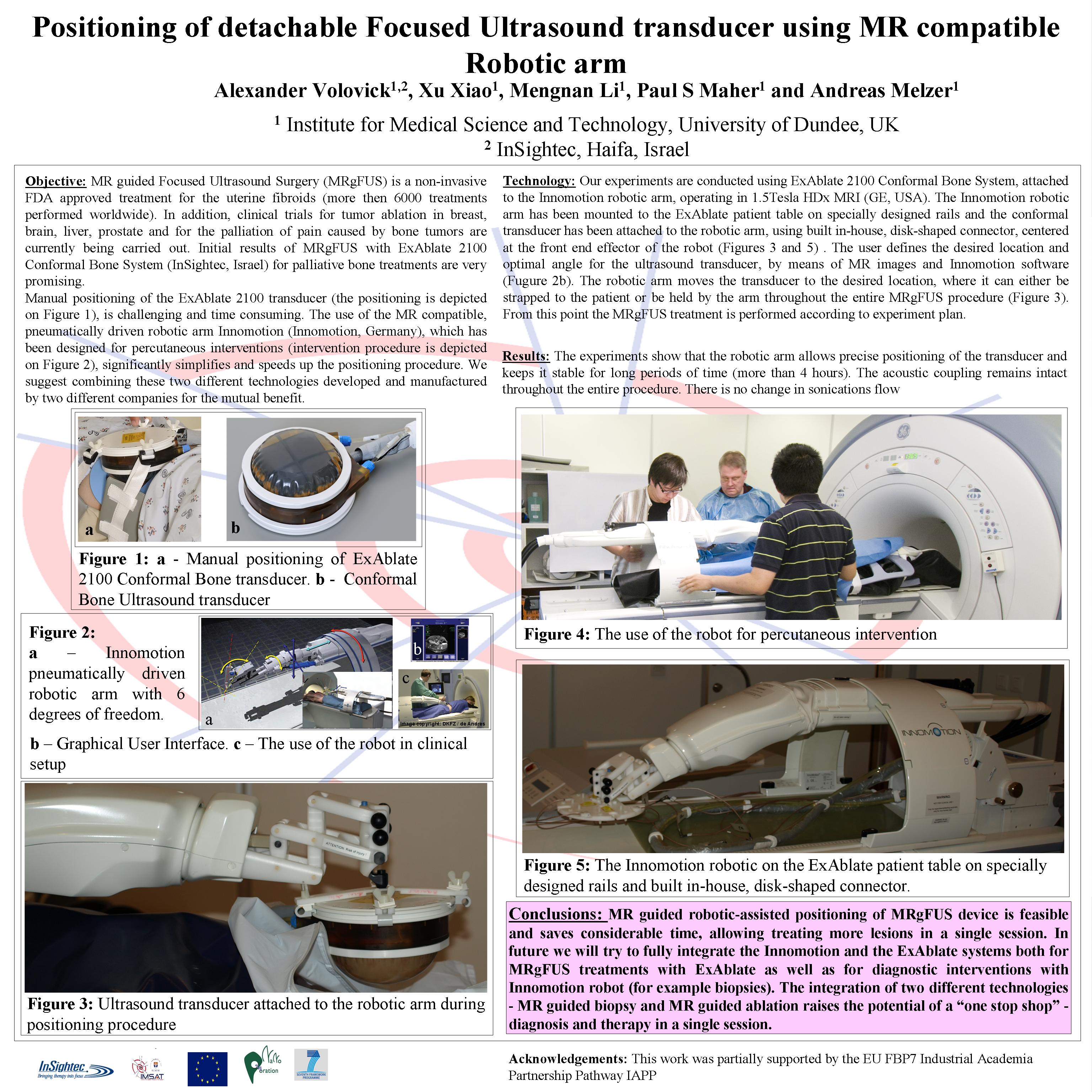
Objective of the technology or device: In resent years Magnetic Resonance Imaging (MRI) has established itself as a leading imaging modality, boosting the development of MR guided interventional techniques and devices. MR guided Focused Ultrasound Surgery (MRgFUS) is a non-invasive FDA approved treatment for the uterine fibroids (more then 6000 treatments performed worldwide). In addition, clinical trials for tumor ablation in breast, brain, liver, prostate and for the palliation of pain caused by bone tumors are currently being carried out. Initial results of MRgFUS with ExAblate 2100 Conformal Bone System (InSightec, Israel) for palliative bone treatments are very promising. However, manual positioning of the ExAblate 2100 transducer, is quite challenging and time consuming. The use of the MR compatible, pneumatically driven robotic arm Innomotion (Innomotion, Germany), which has been designed for percutaneous interventions, significantly simplifies and speeds up the positioning procedure. We suggest combining these two different technologies developed and manufactured by two different companies for the mutual benefit.Description of the technology and method of its use or application: Our experiments are conducted using ExAblate 2100 Conformal Bone System, attached to the Innomotion robotic arm, operating in 1.5Tesla HDx MRI (GE, USA). The Innomotion robotic arm has been mounted to the ExAblate patient table on specially designed rails and the conformal transducer has been attached to the robotic arm, using built in-house, disk-shaped connector, centered at the front end effector of the robot. The user defines the desired location and optimal angle for the ultrasound transducer, by means of MR images and Innomotion software. The robotic arm moves the transducer to the desired location, where it can either be strapped to the patient or be held by the arm throughout the entire MRgFUS procedure. From this point the MRgFUS treatment is performed according to experiment plan.Preliminary results if available: The experiments show that the robotic arm allows precise positioning of the transducer and keeps it stable for long periods of time (more than 4 hours). The acoustic coupling remains intact throughout the entire procedure. There is no change in sonications flow.Conclusions/Future directions: MR guided robotic-assisted positioning of MRgFUS device is feasible and saves considerable time, allowing treating more lesions in a single session. In future we will try to fully integrate the Innomotion and the ExAblate systems both for MRgFUS treatments with ExAblate as well as for diagnostic interventions with Innomotion robot (for example biopsies). The integration of two different technologies – MR guided biopsy and MR guided ablation raises the potential of a “one stop shop” – diagnosis and therapy in a single session.
Session: Emerging Technology Poster
Program Number: ETP080
View Poster
{kind=link}