Jay M Macgregor, MD, Rebekah S Kim, MD, Joseph T Gallagher, MD, Mark K Soliman, MD, Andrea Ferrara, MD, Kiyanda Baldwin, MD, Rudolfo Pigalarga, MD, Carlos Glanville, MD. Orlando Health, Colon and Rectal Clinic of Orlando
Introduction:
Our objective was to create a simulation-based training curriculum for robotic surgery analogous to the curriculum that exists for Fundamentals of Laparoscopic Surgery (FLS). While FLS provides a useful introduction to minimally invasive surgical skills, there are no structured teaching and skills assessment specific for robotic surgery.
The FLS curriculum resulted from the need to safely introduce laparoscopic techniques into clinical practice. The FLS program has been rigorously validated and is now a core component of surgical education. Robotic surgery was first reported in 1985 and has continued to rapidly evolve over the past two decades. Despite its increasing use in surgical practice, no formal certification exists to show competency in robotic surgery. The purpose of this study is to determine the feasibility of developing a Fundamentals of Robotic Surgery (FRS) program using available simulation technology.
Methods:
A literature review was performed regarding the creation of FLS and robotic surgery education. A commercially available robotic simulator (Skills Simulator for da Vinc SI®, Intuitive Surgical) at a minimally invasive academic center of excellence was studied for core robotic skills.
Results:
Five tasks were selected which represent robotic competencies as outlined in the table.
| Task | Skills Tested |
| Peg board (Fig. 1) | Tests camera control and manual dexterity. |
| Camera targeting (Fig. 2) | Tests depth perception, camera control and operating within limits of the robotic view |
| Ring Walk (Fig. 3) | Tests tissue handling, manual dexterity and ability to change between camera control and manipulation of instruments. |
| Energy dissection (Fig. 4) | Tests use of energy device, manual dexterity and use of both hands in a complimentary manner. |
| Suture sponge (Fig. 5) | Tests accuracy of movements with needle control and needle driving. Tests clutching of robotic instruments. |
FIGURE 1: PEG BOARD

FIGURE 2: CAMERA TARGETING

FIGURE 3: RING WALK
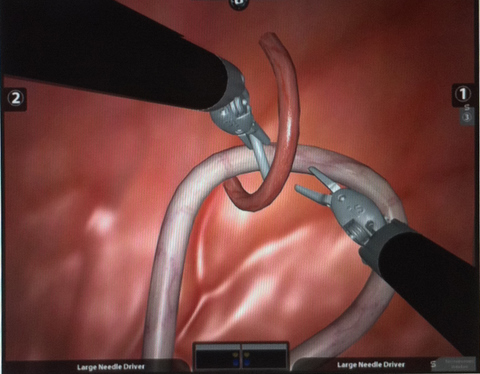
FIGURE 4: ENERGY DISSECTION
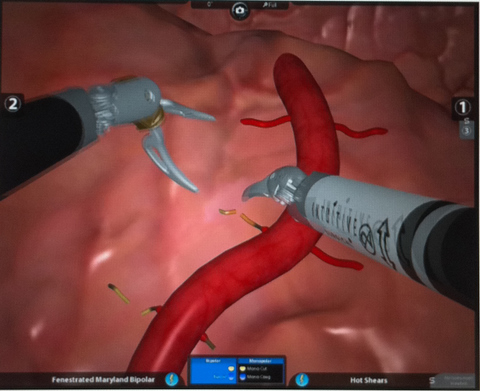
FIGURE 5: SUTURE SPONGE

CONCLUSION:
Simulation is a safe and accessible way to improve surgical technique. Currently there are 169 Skills Simulators for da Vinci SI® robots in use worldwide, with 156 of these in the United Sates. Simulated tasks, such as those used in FLS, allow for a validated, objective assessment of technical skill. Current robotic simulation provides objective measurement of multiple parameters including economy of motion and excessive instrument force. Transfer of skills acquired through simulation training can improve performance in the operating room.
Robotic surgery is currently utilized across numerous surgical specialties with 1,411 daVinci Surgical System® robots in the United States. There is a need to develop a program to assess technical skills specific to basic robotic surgery thereby enhancing surgical education and improving patient safety.
Session Number: Poster – Poster Presentations
Program Number: P151
View Poster